Kratownica - Metoda Równoważenia Węzłów krok po kroku
Zadanie: Dla kratownicy statycznie wyznaczalnej obliczyć reakcje podporowe i wyznaczyć metodą równoważenia węzłów siły w prętach.
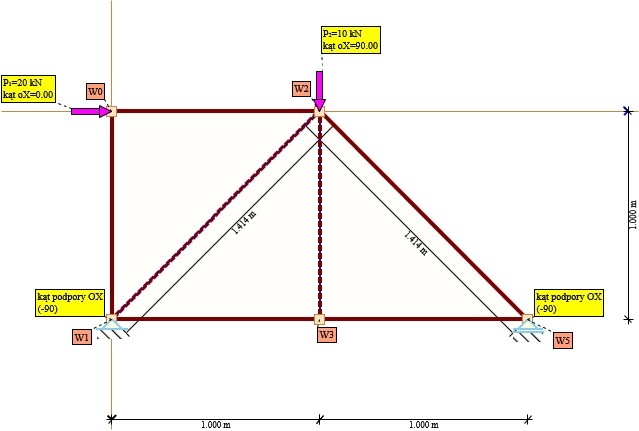
Rys. 1. Schemat kratownicy
1. Ustalenie warunku statycznej niewyznaczalności układu
Warunek konieczny geometrycznej niezmienności i statycznej wyznaczalności kratownicy o strukturze prostej:
gdzie:
- = liczba prętów kratownicy
- = liczba węzłów kratownicy
- = liczba stopni swobody odbieranych przez podpory
Kratownica:
Warunek: , warunek jest spełniony.
2. Obliczenie kątów nachylenia prętów do osi X (wariant z sin i cos)
Pręt Nr 1-2 = (-45)°
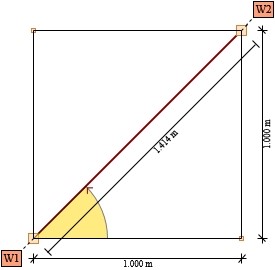
Rys. 2. Kąt nachylenia pręta 1-2
Pręt Nr 2-5 = 45°
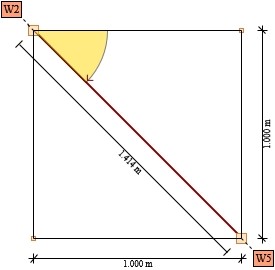
Rys. 3. Kąt nachylenia pręta 2-5
3. Wyznaczenie reakcji podporowych
Siły i reakcje będziemy przyjmować za dodatnie, gdy są skierowane zgodnie z układem osi XY, za ujemne, gdy są skierowane niezgodnie z układem osi XY. Będziemy rzutować siły i reakcje na oś X i oś Y wyliczając odpowiednie składowe rzutów:
gdzie to kąt zawarty pomiędzy siłą lub reakcją a osią X, na podstawie tego kąta można określić zwrot siły lub reakcji.
Uwalniamy daną kratownicę od więzów i wyznaczamy reakcje podporowe.
Ogólne warunki równowagi:
3.1. Suma momentów
Suma wszystkich momentów od składowych reakcji i obciążeń siłowych w punkcie, w którym Moment = 0. Przyjmujemy punkt, w którym znajduje się podpora przegubowa, w tym punkcie Moment = 0.
3.2. Suma sił w kierunku X
Suma wszystkich składowych reakcji i obciążeń siłowych rzutowana na oś X:
3.3. Suma sił w kierunku Y
Suma wszystkich składowych reakcji i obciążeń siłowych rzutowana na oś Y:
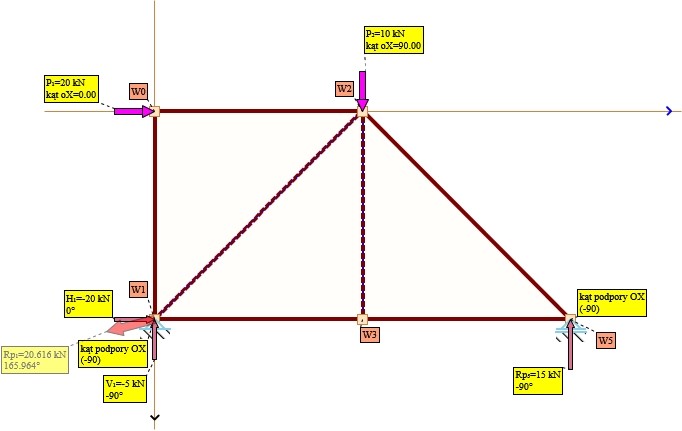
Rys. 4. Reakcje podporowe
4. Sprawdzenie reakcji podporowych
Sprawdzenia poprawności wyznaczenia reakcji podporowych dokonamy w punkcie [(-1);(-1)] w naszym układzie XY (punkt musi być tak dobrany, aby wszystkie siły i reakcje brały udział w obliczaniu Sumy Momentów). W punkcie tym Suma Momentów od wszystkich sił i reakcji powinna wynosić .
Suma wszystkich momentów od składowych reakcji i obciążeń siłowych w punkcie, w którym Moment = 0:
5. Sprawdzenie reakcji podporowych - rzut X
6. Sprawdzenie reakcji podporowych - rzut Y
7. Obliczenie kątów nachylenia prętów do osi X (wariant z tan)
i to różnica pomiędzy współrzędnymi końca pręta.
Pręt Nr 0-2 = 0°
Pręt Nr 2-3 = 90°
Pręt Nr 1-3 = 0°
Pręt Nr 1-0 = (-90)°
Pręt Nr 3-5 = 0°
Pręt Nr 2-5 = 45°
Pręt Nr 1-2 = (-45)°
8. Obliczenie sił w prętach
Aby węzeł był w równowadze to suma jego składowych sił i reakcji rzutowana na oś X i oś Y musi być równa zero:
gdzie:
- to suma sił prętowych rzutowana na oś X w węźle
- to suma reakcji podporowych rzutowana na oś X w węźle (jeżeli istnieje)
- to suma odziaływania zewnętrznego rzutowana na oś X w węźle (jeżeli jest przyłożona)
- to suma sił prętowych rzutowana na oś Y w węźle
- to suma reakcji podporowych rzutowana na oś Y w węźle (jeżeli istnieje)
- to suma odziaływania zewnętrznego rzutowana na oś Y w węźle (jeżeli jest przyłożona)
Obliczenia rozpoczynamy od węzła, dla którego liczba niewiadomych sił w prętach jest najmniejsza i wynosi maksymalnie 2.
Węzeł nr 0
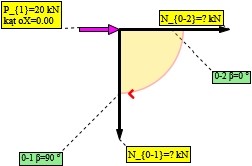
Rys. 5. Węzeł nr 0
Do policzenia: ,
Do policzenia: ,
Rzutowanie na oś X:
Rzutowanie na oś Y:
Układ równań:
Wynik:
Węzeł nr 5
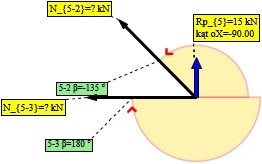
Rys. 6. Węzeł nr 5
Do policzenia: ,
Do policzenia: ,
Rzutowanie na oś X:
Rzutowanie na oś Y:
Układ równań:
Wynik:
Węzeł nr 1
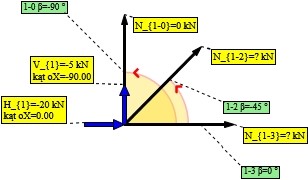
Rys. 7. Węzeł nr 1
Do policzenia: ,
Do policzenia: ,
Policzone: ,
Rzutowanie na oś X:
Rzutowanie na oś Y:
Układ równań:
Wynik:
Węzeł nr 2
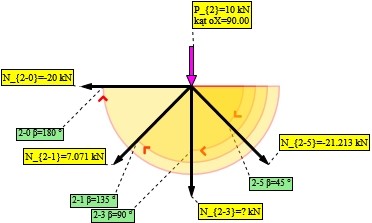
Rys. 8. Węzeł nr 2
Do policzenia: ,
Policzone: ,
Policzone: ,
Policzone: ,
Rzutowanie na oś X:
Rzutowanie na oś Y:
Równanie:
lub równanie:
Wynik:
9. Zestawienie wszystkich sił w prętach
| Pręt | N [kN] | kąt [°] | L [m] | funkcja |
|---|---|---|---|---|
| 0-2 | -20.0000 | 0.0000 | 1.0000 | ściskany |
| 2-3 | 0.0000 | 90.0000 | 1.0000 | jest zerowy |
| 1-3 | 15.0000 | 0.0000 | 1.0000 | rozciągany |
| 0-1 | 0.0000 | 90.0000 | 1.0000 | jest zerowy |
| 3-5 | 15.0000 | 0.0000 | 1.0000 | rozciągany |
| 2-5 | -21.2132 | 45.0000 | 1.4142 | ściskany |
| 1-2 | 7.0711 | -45.0000 | 1.4142 | rozciągany |
Zadanie zostało wygenerowane w programie Kratos.