Metoda Przemieszczeń
Wprowadzenie
Metoda przemieszczeń – metoda zwana także metodą odkształceń, pozwalająca obliczać układy statycznie niewyznaczalne.
Co to są układy statycznie niewyznaczalne, możesz dowiedzieć się w artykule Konstrukcje statycznie niewyznaczalne.
Algorytm obliczeń
- Wyznaczanie stopnia kinematycznej niewyznaczalności układu
- Przyjęcie układu podstawowego i układu równań kanonicznych
- Obliczenie łańcucha kinematycznego
- Obliczanie układu równań kanonicznych (macierz sztywności)
- Obliczanie momentów przywęzłowych, sił tnących i sił normalnych
- Obliczenie i sprawdzanie reakcji podporowych
Przykład obliczeniowy
Zadanie: Wyznaczyć wykresy M, T, N dla ramy przedstawionej na poniższym schemacie przy pomocy metody przemieszczeń.
1. Schemat zadania
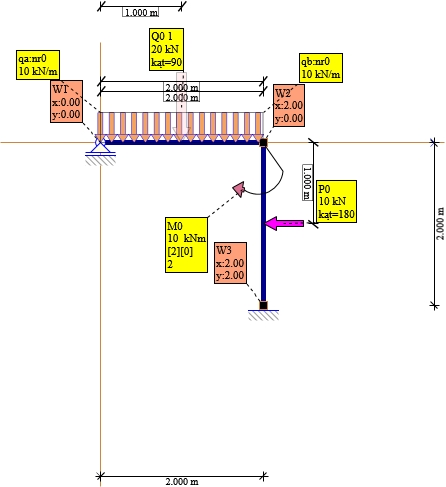
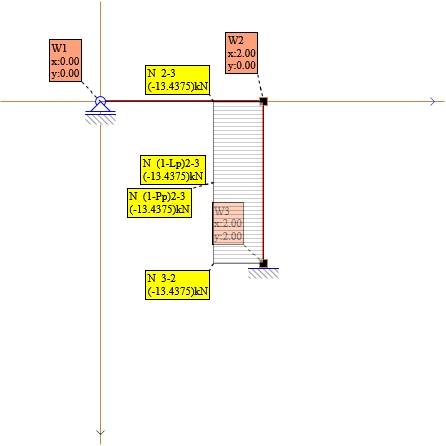
Rys. 1. Schemat układu
Współrzędne węzłów:
- Węzeł 1: x = 0.000 m, y = 0.000 m
- Węzeł 2: x = 2.000 m, y = 0.000 m
- Węzeł 3: x = 2.000 m, y = 2.000 m
Przyjęto przekrój podstawowy:
- I = 3060 cm⁴
- E = 205 GPa
- Globalne EI = 6273 kNm²
- Globalne EA = 809750 kN
2. Ustalenie stopnia kinematycznej niewyznaczalności układu (SKN)
Węzły o nieznanych obrotach:
φ = 1 = węzły - podpory - przeguby
SKN = φ + Δ = 2
Układ jest 2-krotnie kinematycznie niewyznaczalny.
3. Przyjęcie układu podstawowego
Układ równań kanonicznych:
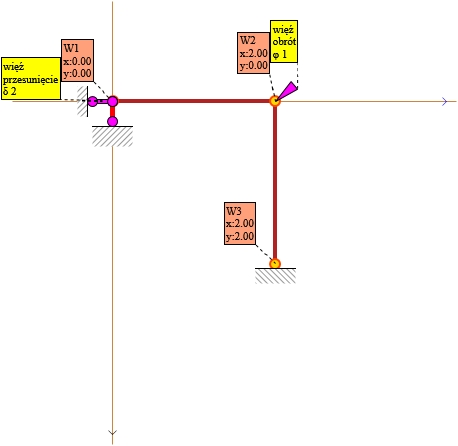
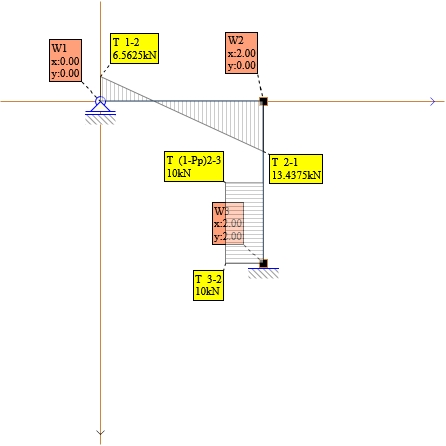
Rys. 2. Układ podstawowy metody przemieszczeń
4. Obliczenie zależności kątowych obrotu cięciw prętów układu
Obliczenie zależności kątowych obrotu cięciw prętów układu potrzebnych do wyznaczenia macierzy sztywności dla stanu Stan δ₂, Δ=1.
Wybieram węzeł przesuwany 1.
Węzeł przemieści się wtedy o:
Przyjęte przemieszczenie i kąt podstawiam do łańcuchów kinematycznych jako wiadome.
Łańcuch obliczany: 1-2, 2-3
Po obliczeniu równania:
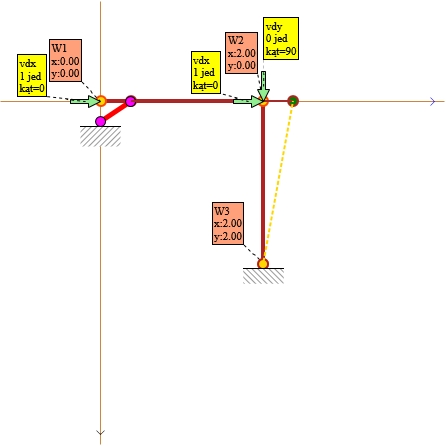
Rys. 3. Łańcuch kinematyczny Stan δ2 Δ=1
5. Stan φ₁
Rys. 4. Stan φ₁
6. Stan δ₂
Rys. 5. Stan δ₂
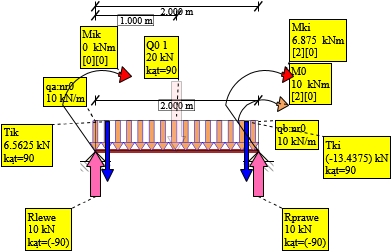
7. Stan P - obciążenie mpq
q pręt = 1-2:
P pręt = 2-3:
Rys. 6. Stan P
8. Współczynniki macierzy sztywności i wyrazów wolnych
9. Układ równań kanonicznych
Po rozwiązaniu układu otrzymano:
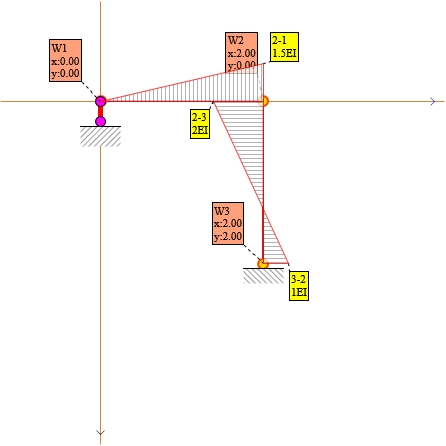
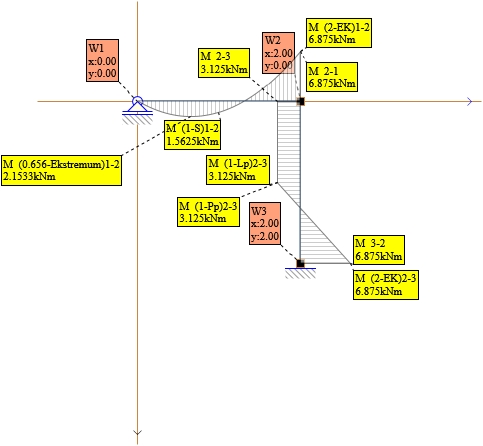
10. Obliczenie momentów przywęzłowych
Zgodnie ze wzorem:
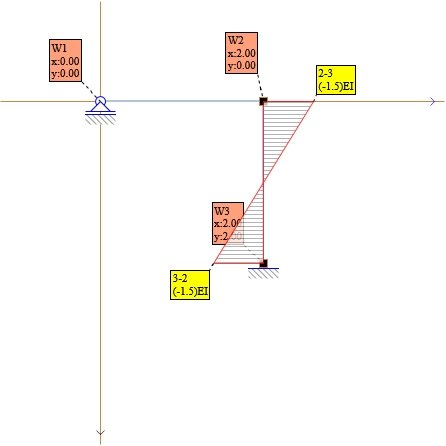
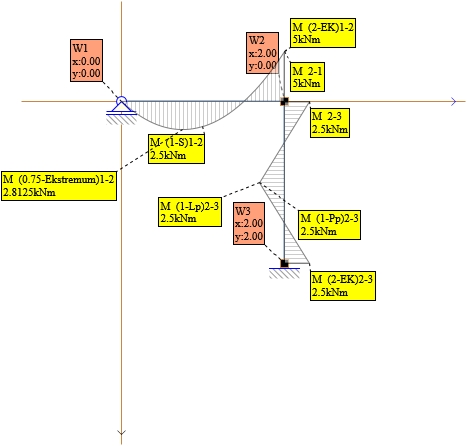
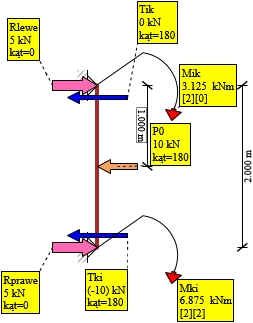
Rys. 7. Wykres M
11. Obliczenie sił tnących
Pręt 1-2:
Rys. 8. Siły tnące 1-2
Pręt 2-3:
Rys. 9. Siły tnące 2-3
Wykres T:
Rys. 10. Wykres T
12. Obliczenie sił normalnych
Aby węzeł był w równowadze, suma jego składowych sił i reakcji rzutowana na oś X i oś Y musi być równa zero:
Gdzie:
- ΣSx - suma sił prętowych rzutowana na oś X w węźle
- ΣRx - suma reakcji podporowych rzutowana na oś X w węźle (jeżeli istnieje)
- ΣPx - suma oddziaływania zewnętrznego rzutowana na oś X w węźle (jeżeli jest przyłożona)
- ΣSy - suma sił prętowych rzutowana na oś Y w węźle
- ΣRy - suma reakcji podporowych rzutowana na oś Y w węźle (jeżeli istnieje)
- ΣPy - suma oddziaływania zewnętrznego rzutowana na oś Y w węźle (jeżeli jest przyłożona)
Obliczenia rozpoczynamy od węzła, dla którego liczba niewiadomych sił w prętach jest ≤ 2.
Elementy szukane oznaczono kolorem czerwonym. Elementy zerowe są przedstawione w tle rysunku.
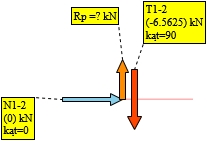
Wybrano węzeł 1:
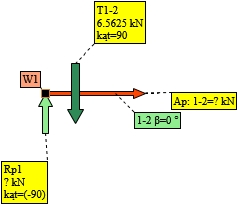
Rys. 11. Analiza węzła 1 - schemat
Rzutowanie na oś X
Rzutowanie na oś Y
Równanie X
Równanie Y
Wynik
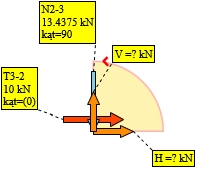
Wybrano węzeł 2:
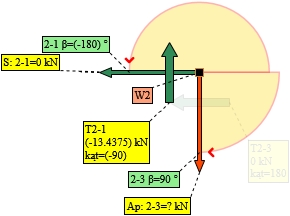
Rys. 13. Analiza węzła 2 - schemat
Rzutowanie na oś X
Rzutowanie na oś Y
Równanie X
Równanie Y
Wynik
Wykres N:
Rys. 14. Wykres N
13. Obliczenie reakcji podporowych
Aby węzeł był w równowadze, suma jego składowych sił i reakcji rzutowana na oś X i oś Y musi być równa zero:
Gdzie:
- ΣSx - suma sił prętowych rzutowana na oś X w węźle
- ΣRx - suma reakcji podporowych rzutowana na oś X w węźle (jeżeli istnieje)
- ΣPx - suma oddziaływania zewnętrznego rzutowana na oś X w węźle (jeżeli jest przyłożona)
- ΣSy - suma sił prętowych rzutowana na oś Y w węźle
- ΣRy - suma reakcji podporowych rzutowana na oś Y w węźle (jeżeli istnieje)
- ΣPy - suma oddziaływania zewnętrznego rzutowana na oś Y w węźle (jeżeli jest przyłożona)
Wybrano węzeł 1:
Rys. 15. Reakcje w węźle 1 - schemat
Rzutowanie na oś X
Rzutowanie na oś Y
Równanie X
Równanie Y
Wynik
Wybrano węzeł 3:
Rys. 17. Reakcje w węźle 3 - schemat
Rzutowanie na oś X
Rzutowanie na oś Y
Układ równań
Wynik
Reakcje podporowe:
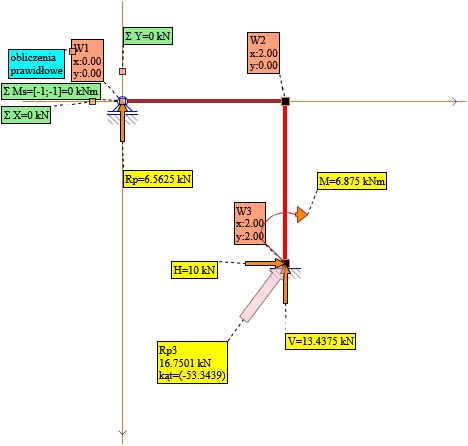
Rys. 16. Reakcje podporowe
14. Sprawdzenie reakcji podporowych - moment
Sprawdzenia poprawności wyznaczenia reakcji podporowych dokonamy w punkcie [(-1); (-1)] w układzie XY.
Punkt musi być tak dobrany, aby wszystkie siły i reakcje brały udział w obliczaniu sumy momentów.
W punkcie tym suma momentów od wszystkich sił i reakcji powinna wynosić M = 0:
15. Sprawdzenie reakcji podporowych - rzut X
16. Sprawdzenie reakcji podporowych - rzut Y
17. Ocena wyników obliczeń
Z uwagi na spełnione warunki:
Ocena: obliczenia prawidłowe
18. Sprawdzenie kinematyczne
Sprawdzamy, czy przemieszczenia w poszczególnych punktach spełniają warunki podparcia i ciągłości. Wystarczy sprawdzić tyle składowych, ile wynosi SSN (Stopień Statycznej Niewyznaczalności).
Przekształcamy schemat naszego układu na statycznie wyznaczalny poprzez redukcję nadliczbowych więzów. W miejscach usuniętych nadliczbowych przykładamy kolejno obciążenia jednostkowe i wyznaczamy momenty zginające.
Obciążenia jednostkowe dla kątów obrotu mają charakter momentów jednostkowych. Obciążenia jednostkowe dla przemieszczeń liniowych mają charakter sił jednostkowych. Przemieszczenia wynikowe obliczamy ze wzoru Maxwella-Mohra.
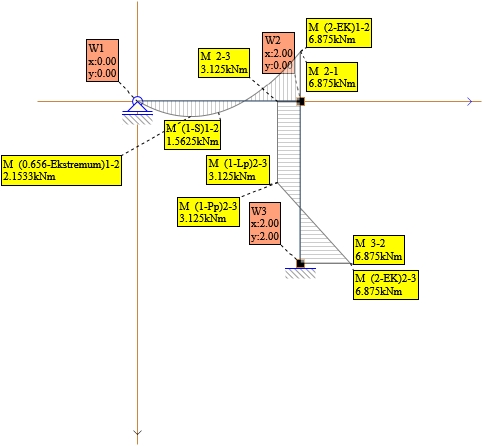
Rys. 17. Wykres M
19. Obliczenie układu podstawowego dla X₁
Działa tylko X₁.
Sprawdzono poprawność obliczeń dla schematu statycznego.
Pręt 1-2: Mik = 0, Mki = 1
Pręt 2-3: Mik = (-1), Mki = 1
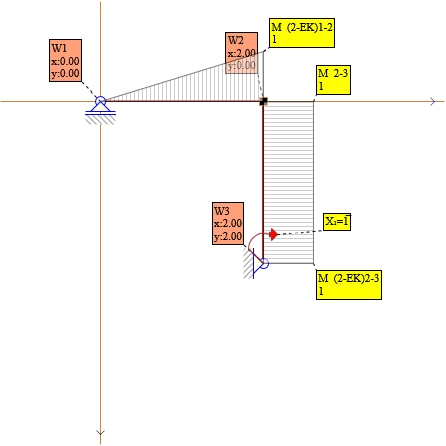
Rys. 18. Momenty dla X₁
20. Suma współczynników kontrolnych
Składnik M obciążenie:
Suma współczynników pomiarowych: [0]
Obliczenia dokonane w programie Metor.